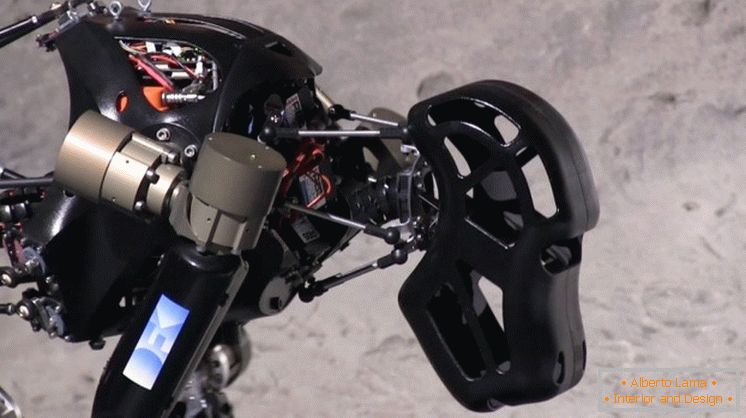
Das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) und die Universität Bremen arbeiten am Simian-Roboter iStruct Demonstrator, der als "Weltraumroboter" eingestuft wird. Jetzt bestehen die mechanischen Affen Tests für Laufen und Gleichgewicht unter Bedingungen nahe dem Relief des Mondes.

Das Studium gefährlicher Mondoberflächen erfordert den Einsatz verschiedener Bewegungsformen. Forscher des DFKI untersuchen ihre Fähigkeiten (einschließlich einer Kombination aus Beinen, Rädern und Raupen). Affenähnliche Roboter haben bestimmte Vorteile im Vergleich zu Rädern, Vierpunkt-Unterstützung ermöglicht es Ihnen, eine stabilere Position beim Klettern durch Hindernisse oder hügeliges Gelände zu schaffen. Der Roboter kann auf seinen Hinterbeinen balancieren, um die Vorderbeine freizusetzen, um irgendeine Aktion auszuführen.

Bei neuen internationalen Interessen in der Mondmission besteht die Möglichkeit, dass iStruct (oder einer seiner Nachkommen) den Mond besuchen kann. Die Kolonisierung des Mondes durch Roboter wird mit einer Entwicklung beginnen, die sich in jeder aktuellen Situation entwickeln und vernünftig reagieren kann, wobei das Ziel des Projekts darin besteht, "fortgeschrittene künstliche Intelligenz" und ein Robotersystem zu schaffen, das lernen und navigieren kann.
Der Roboter verfügt über eine klappbare Wirbelsäule, die den Rumpf und das Becken verbindet, was ihm eine größere Flexibilität verleiht, sowie einen Belastungssensor für den Fuß und den Knöchel, der in Kontakt mit dem Boden reagiert.
Andere Eigenschaften umfassen:
- 43 unabhängige Motoren;
- Sechs zusätzliche FSR-Sensoren an offenen Teilen zum Erkennen von Hindernissen;
- 6-Achsen-Drehmomentsensor;
- Digitaler 3-Achsen-Beschleunigungsmesser, um die Orientierung des Fußes im Raum wahrzunehmen;
- Zwei Temperatursensoren zur Kompensation von Temperaturänderungen in der Elektronik;
- Digitaler Magnetsensor zur Winkelsteuerung jeder beweglichen Achse des Fußes und des Sprunggelenks;
Die meisten Roboter enthalten bereits viele dieser Sensoren, aber das gelenkige iStruct-Rückgrat (das als 6-Achsen-Drehmomentaufnehmer fungieren kann) ist eine Art von Seltenheit für Bewegungsroboter, die bei der Bewegung auf allen Vieren hilft. Sensoren in den Fuß- und Sprunggelenken ermöglichen es ihm, auf einer geneigten Oberfläche das Gleichgewicht zu halten.
In den Jahren 2008 und 2009 arbeitete ein Diplom-Ingenieur Daniel Kuhn an einem ähnlichen Roboter. Ein kleiner Affe, der einfach zu Fuß gehen konnte. Nach diesem Projekt begann er mit der Arbeit an iStruct, die eine Reihe von wichtigen Updates hat. Dies ist ein viel größeres Gewicht, 18 kg (40 Pfund) und Abmessungen von 66 x 43 x 75 cm (26 x 17 x 29 Zoll), und enthält auch 26 Freiheitsgrade und von verschiedenen Elektromotoren angetrieben. Das Projekt sollte im August dieses Jahres abgeschlossen sein.
Sie können sehen, wie er seine intellektuellen Füße und Knöchel beim Laufen benutzt und das Gleichgewicht im Video unten hält. Dies ist ein kleiner Schritt für einen Affenroboter, aber möglicherweise ein riesiger Sprung für alle Roboter ähnlicher Konstruktion.
Gehen
Balancieren
Fotogalerie Gesamt | 14 Bilder